Некоторое время назад мне потребовался девайс, который подавал бы сигнал при горизонтальном положении или отклонении датчика от горизонтальной плоскости на угол не более 20-30 градусов. Для чего - это отдельная история, поэтому касаться её здесь не буду.
Для реализации поставленной задачи был выбран акселерометр SMB380 производства компании Bosch. Несмотря на свои крохотные размеры – 3х3 мм, он позволяет измерять ускорение по трём осям с чувствительностью 2g, 4g, 8g и передавать эту информацию на контроллер по шинам I2C и SPI. Акселерометр SMB380 отличается низким потреблением тока (200 мкА) при напряжении питания 2,4 – 3,6В.
В качестве обработчика полученной информации применён контроллер 16F628A. Его использование здесь не совсем оправдано, вполне хватило бы что-нибудь типа 12F629 или 12F675. Но у меня уже давно валялась плата, с установленным на ней PIC контроллером 16F628A и разводкой его под используемый акселерометр. Поэтому, после небольшой доработки, эта плата вполне подошла под выполнение требуемых функций.
Принципиальная схема датчика наклона приведена на рис. 1. Акселерометр и микроконтроллер соединены по шине I2C. Для их питания используется стабилизатор на 3,3В. Управляющий сигнал подаётся на базу транзистора VT1, в коллекторную цепь которого включена нагрузка К1. Питание нагрузки осуществляется от напряжения 5В, в её качестве можно использовать реле на соответствующее напряжение и ток, бузер для звуковой сигнализации, светодиод и т.д.
Рис. 1
Самой сложной задачей оказалось подключить акселерометр. При размерах 3х3 мм он имеет с двух сторон по пять контактов. Сделать разводку такого чипа «утюжно - лазерным методом» довольно сложно. Поэтому акселерометр подключается к основной печатной плате через переходник.
Для изготовления такого переходника нужно взять маленький кусочек макетной платы и распаять на ней по четыре пина с двух сторон с таким расчётом, что бы они входили в обычную 8-ми пиновую «кроватку» для микросхем в корпусе DIP (рис. 2). Восьми выводов нам вполне достаточно, т.к. в акселерометре выводы 1 и 10 не используются.
Рис. 2
Затем надфилем удаляются контактные площадки между рядами выводов. Поверхность обезжиривается и на неё приклеивается чип акселерометра выводами вверх (рис. 3)
Рис. 3
Что бы не ошибиться, откуда начинается отсчёт выводов акселерометра, на переходной платке необходимо сделать небольшой пропил, который будет являться «ключом». Обратите внимание, что т.к. чип перевёрнут, нумерация его выводов будет вестись с нижнего левого пина по часовой стрелке.
Для распайки выводов акселерометра нужен провод диаметром до 0,3 мм. Для этого можно использовать одну жилу из многожильного монтажного провода. На выводы чипа наносится жидкий флюс и касанием остро заточенного паяльника припаивается провод. Это самая сложная и ответственная операция, которая требует терпения и твёрдой руки. Работу следует выполнять низковольтным паяльником, под увеличительным стеклом, переходную плату надёжно закрепить в небольших тисках.
Распайку начинают со второго вывода чипа (как говорилось выше, выводы 1 и 10 не задействованы). После того, как провод припаян к пину SMB380, его очень осторожно отводят в сторону и припаивают к выводу переходной платы. То, что должно получится в конечном результате, показано на рис. 4
Рис. 4.
Далее с помощью спирта снимаются остатки жидкого флюса, проводится контроль под увеличением на предмет замыканий на выводах чипа и переходная плата готова.
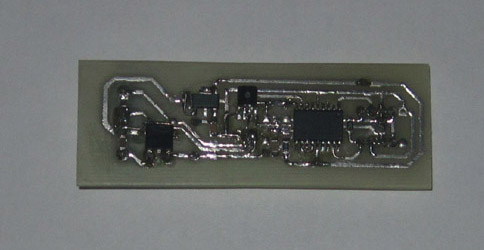
Внешний вид собранной печатной платы приведён на рис. 5. В своё время она использовалась для других целей, поэтому пришлось её немного доработать, удалив лишние детали и установив недостающие в соответствии со схемой на рис. 1
Рис. 5
Конструктивно устройство собрано в корпусе от отслужившей свой срок компьютерной мышки. Выключатель питания установлен на месте колеса прокрутки. Питание устройства осуществляется от батареи «Крона». Расположение платы и других элементов внутри корпуса показано на рис. 6, а внешний вид – на рис. 7.
Рис. 6
Рис. 7
Программа датчика наклона работает следующим образом – после включения питания в качестве тестирования на одну секунду включается нагрузка К1 Если датчик продолжает находиться в горизонтальном положении (или отклонён от него не более 30 градусов), то через 10 секунд снова включается нагрузка К1 на время 5 секунд. Далее всё повторяется по циклу. Если наклон относительно горизонтальной оси составит более 30 градусов, то датчик находится в режиме ожидания.
Разумеется, данная программа разрабатывалась под конкретные требования и её алгоритм довольно специфический. Однако, если данная тема кого-то заинтересует, то можно доработать программу так, что бы необходимые значения наклона, времени контроля, времени подачи сигнала прописывались через EEPROM и пользователь мог задавать их самостоятельно. А применение подобное устройство может найти во многих направлениях, например, в качестве датчика охранной сигнализации автомобиля. Тем более, что используемый акселерометр позволяет измерять не только ускорение и наклон по трём осям, но так же движение и вибрацию. Кроме того, с помощью данного чипа можно измерять температуру в диапазоне от -30 до + 97,5 градусов.
Очень нужны полные сведения , а именно тех характеристики (Габаритные размеры , Рабочая температура , Потребляемый ток) Прошу ответить как можно быстрее !!
А сведения конкретно о чем? Если о самом акселерометре SMB380, то все эти сведения есть в даташите, если о собранном датчике - Вы же видите, это не промышленное изделие, о каких габаритах может идти речь, если корпус использовался тот, что оказался подходящий по размеру Хотя, данное устройство можно сделать очень компактным, особенно если применить внешнее питание.
Хммм я же писал помимо габаритных мне бы ещё рабочую температуру, потребляемый ток и змеряемый угол наклона. Просто я решил сделать курсовую на ваш прибор )
Что-то очень уж простая схема для курсовой работы. Что касается параметров - так в чем проблема не могу понять? Берем даташит на акселерометр, там есть абсолютно все характеристики:
Что тут недосточно или непонятно? Или предлагается мне заняться написанием курсовой работы?




 Хотя, данное устройство можно сделать очень компактным, особенно если применить внешнее питание.
Хотя, данное устройство можно сделать очень компактным, особенно если применить внешнее питание.

