Наверное, многие из нас сталкивались со следующей ситуацией – уезжая надолго из дома – в отпуск, командировку и т.д приходится решать следующую задачу – как в наше отсутствие полить цветы или покормить рыбок в аквариуме. Приходится оставлять соседям ключи и просить их выполнить эти работы.
Сегодня мы поговорим, как организовать автоматическое кормление аквариумных рыбок. Конечно, в продаже имеются различные автоматические кормушки для аквариумов. Однако нашей целью является не купить нечто готовое, а реализовать такое устройство самостоятельно, приложив небольшие материальные затраты и умственные усилия.
Итак, что нам требуется сделать? Мы должны создать такое устройство, которое с заданной периодичностью будет вбрасывать в аквариум определённое количество корма. Следовательно, нужна емкость, где будет храниться запас корма на весь период нашего отсутствия. Теперь нужно решить, как этот корм оттуда извлекать дозированными порциями. Для этого существуют различные решения, например, в емкости с кормом устанавливается задвижка, управляемая электромагнитом. В определённое время, по команде с управляющего устройства, задвижка открывается на одну-две секунды, порция корма попадает в аквариум, после чего задвижка закрывается. Сначала планировалось сделать кормушку именно по такому принципу. Однако, экспериментируя с макетом, пришлось убедиться в том, что данная система не всегда чётко срабатывает. Универсальный корм (а многие любители рыбок используют именно его) имеет такое свойство, как «слипание» - т.е. пластинки корма как бы склеиваются между собой и часто, при открывании заслонки, корм не «проваливается» в аквариум. Следовательно, в момент загрузки его нужно хорошо встряхнуть. Поэтому, было решено изменить общий принцип загрузки – заменить перемещение заслонки на вращение непосредственно самой емкости. Это позволило значительно упростить конструкцию самого ответственного узла в кормушке.
С «теорией» немного разобрались, теперь перейдём непосредственно к изготовлению самой кормушки. Её габариты и способ установки будут зависеть от размеров и конструкции аквариума. Для наглядности, допустим, что у нас имеется вот такой аквариум (рис.1). В нём есть откидная крышка для кормления рыбок, куда мы и установим нашу кормушку.
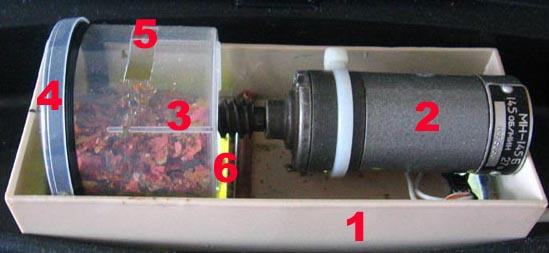
Она представляет собой основание (1) в виде прямоугольной коробки размерами 170*80 мм. На этом основании закреплён двигатель с редуктором, которые представляют собой единый узел (2). Если такой узел найти будет сложно, то его можно заменить, например, электродвигателем с редуктором от детской машинки. Главное, что бы скорость вращения на выходе редуктора была не очень большой, примерно 1-3 оборота в секунду.
На вал редуктора закрепляется емкость с кормом (3). В качестве такой емкости использован прозрачный пластмассовый цилиндрический контейнер с крышкой (4), обрезанный по высоте до нужных размеров. Для того, что бы крышка плотно закрывалась, нужно под неё положить уплотнитель – например, намотать пару витков изоляционной ленты. На боковой поверхности емкости делаем небольшое прямоугольное окошко (5) – мы его потом будем увеличивать при регулировке порции вбрасываемого корма. Так же необходимо сделать прямоугольное окно (6) напротив установленной емкости с кормом в основании кормушки – через это окно корм будет попадать в аквариум.
Приступаем к регулировке. Засыпаем в емкость корм, устанавливаем кормушку на небольшую подставку, под окно в основании кормушки (6), нужно подложить лист бумаги. В исходном состоянии окошко емкости с кормом (5) должно быть в верхнем положении, как на рис.2. Подаем на несколько секунд питание на электродвигатель, что бы контейнер с кормом сделал два полных оборота. Замеряем количество корма, которое высыпалось с контейнера. Исходя из полученного результата, или понемногу увеличиваем размеры окошка 5, или увеличиваем количество оборотов двигателя. Регулируем до тех пор, пока не будет подаваться нужная порция корма. Время работы двигателя нужно подбирать таким образом, что бы после его остановки окошко 5 контейнера было всегда вверху - во избежание самопроизвольного высыпания корма. Но это не особо критично, т.к. уже отмечалось выше, такой корм сам по себе высыпаться не будет. Хотя, перестраховаться не помешает.
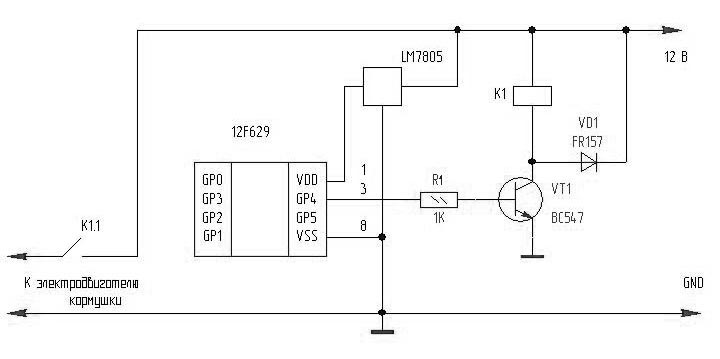
С «механикой» разобрались. Осталось решить, а что же будет управлять нашей кормушкой? В принципе, вариантов здесь может быть очень много – различные таймеры, реле времени и т.д. Я советую собрать простейшую схему управления на самом дешёвом PIC-контроллере – 12F629. Несмотря на то, что схема получается очень простой, она имеет очень хорошую стабильность временных выдержек. А выдержки времени у нас будут действительно большими – представьте, что при паузе в часы нужно включить на пару секунд управляющее реле. Поэтому использование микропроцессора в такой схеме я считаю вполне оправданным. Принципиальная схема управления кормушкой показана на рис.3.
Рис. 3
Как часто приходится кормить аквариумных рыбок? Многие считают, что достаточно одного раза в сутки. Не знаю, насколько это правильно, я не большой специалист в области разведения рыбок, но тоже придерживаюсь этого правила. Проводя регулировку собранной кормушки, экспериментально было проверено, что нужное количество корма вбрасывается в аквариум после трёх полных оборотов двигателя, что составило приблизительно 2 секунды работы двигателя. Исходя из этим значений и была написана управляющая программа для микроконтроллера. Она представляет собой замкнутый цикл по следующему алгоритму – после подачи питания через 2 секунды включается реле (и соответственно двигатель кормушки) на время 2 секунды затем пауза в 24 часа и цикл повторяется.
Во избежание сбоев в работе устройства (при пропадании, а затем последующем восстановлении питания цикл программы начнёт выполнятся сначала) настоятельно рекомендую питать устройство не от сетевого адаптера 12В, а от аккумулятора, например – СА1270 (12В, 7А). Можно подключить аккумулятор параллельно сетевому адаптеру (в так называемый буферный режим), однако это не имеет особого смысла. Если полностью зарядить вышеуказанный аккумулятор, то его самостоятельной работы без подзарядки гарантировано хватит на месяц работы такой кормушки.
Устанавливаем собранное устройство на аквариум (рис. 4, 5), подключаем питание на схему управления и можем спокойно уезжать в отпуск. Рыбки всегда будут накормлены :)